

(Divulgação)
Sistemas de tração 4x4 têm evoluído de forma acelerada nos últimos 30 anos. A razão disto é a aplicação da eletrônica embarcada, que passou a gerenciar diversos parâmetros de distribuição de torque para as rodas para oferecer o melhor desempenho e eficiência. É o que explica o engenheiro da Mitsubishi, Fabio Maggion, que aponta como os sistemas evoluíram nos últimos anos e, consequentemente, se tornaram mais complexos.
“O veículo 4x4 evoluiu para oferecer mais conforto e segurança. Há até pouco tempo, picapes e utilitários exigiam que o motorista descesse do carro e acoplasse a tração nas rodas dianteiras manualmente, travando a ‘roda livre’. Hoje tudo isso é feito eletronicamente, por meio de um seletor no painel e com o carro em movimento”, exemplifica o engenheiro.
Segundo o especialista, a marca não é modesta em afirmar que possui uns dos sistemas de tração mais avançados do mercado o S-AWC, sigla para Super All Wheel Control, que gerencia controle de estabilidade (ESP), controle de diferencial ativo (ACD), freios ABS e distribuição de torque.
Diferencial?
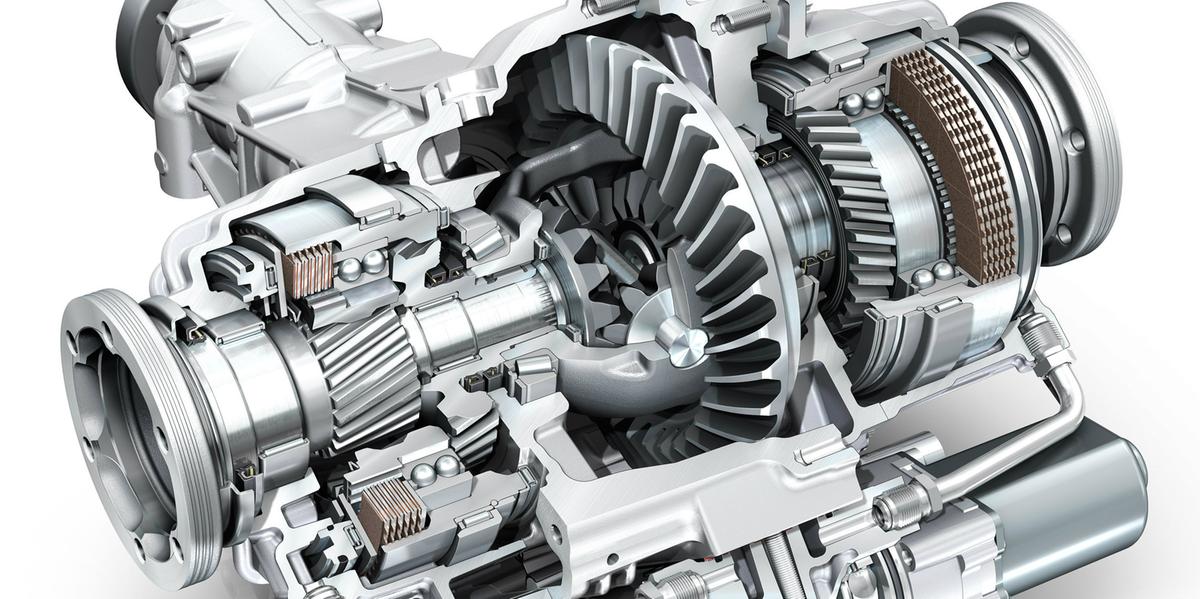
Para quem não sabe o diferencial é um item que distribui o torque do motor. Nos modelos de tração traseira é responsável por impedir que, numa curva, a roda de dentro gire na mesma velocidade que a roda de fora. Caso isso aconteça, a roda de dentro irá derrapar e comprometer o controle do veículo. Nas dianteiras isso não acontece pelo fato de a direção manter as rodas sempre alinhadas.
Acontece que nos carros com tração 4x4 é necessário ainda a inclusão de diferenciais nas rodas dianteiras e um central. Nesse caso a função é distribuir o torque individualmente para cada roda para que o veículo seja capaz de atravessar terrenos acidentados e de baixa aderência.
Voltando ao S-AWC, a tecnologia estreou no mercado junto com o Lancer Evolution X, em 200X, versão de alto desempenho do sedã japonês, que junto com o Subaru WRX STI é um carro de rali feito para uso urbano.
Hoje, o mesmo sistema está presente na veterana Pajero Full. Trata-se de um emaranhado de componentes eletrônicos, engrenagens e sistemas hidráulicos que atuam de acordo com a necessidade do motorista.
Menos teoria
Levamos o carro para o meio do mato. O jipão de quase duas toneladas atravessou terrenos acidentados, alagados, subiu e desceu ladeiras como se trafegasse em piso plano. Enquanto era necessário ficar só atento com a direção e pressionar levemente o pedal do acelerador, abaixo do assoalho o conjunto de três diferenciais trabalhava de forma incessante num balé orquestrado pelo S-AWC.
A picape L200 utiliza sistema bem parecido como explica Maggion. “Desenvolver uma picape se tornou uma operação complexa. No passado bastava ser robusto. Não havia preocupação com a aspereza do veículo. Hoje é um carro que serve para quem precisa carregar carga, para quem curte o estilo da picape, para quem faz uso severo do 4x4 e também para quem o utiliza como automóvel da família. Assim, é preciso entregar conforto e tecnologia, mas sem deixar de lado sua capacidade para uso do terreno”, observa.
Futuro
Se hoje os sistemas de tração 4x4 utilizam soluções complexas, como acionamento magnético de embreagem ou bloqueio por meio de expansão de gel de sílica, o futuro promete aposentar tudo isso. Segundo Maggion, modelos híbridos já oferecem desempenho e eficiência sem perder a robustez dos atuais sistemas de tração integral. “Hoje o Outlander híbrido conta com motor a combustível para tracionar as rodas dianteiras e outro elétrico para mover as rodas traseiras. Isso elimina a necessidade de ter um diferencial central, pois a distribuição de cada motor é feita de forma independente nos diferenciais de cada um dos eixos”.
O próximo passo são os 4x4 totalmente elétricos, que utilizaram três motores, um para as rodas dianteiras e outros dois para as rodas traseiras. A necessidade de dois motores traseiros é que ele elimina definitivamente o diferencial.
Assim não será necessário o componente para distribuir a força do motor para cada uma das rodas traseiras. Toda força será distribuída eletronicamente por uma unidade de comando que irá informar para cada um dos motores a quantidade exata de torque a ser despejada de acordo com a demanda.